
Over a three-year period EGG designed the self-righting crutch for McKesson (Truland) while having to reinvent core ambulatory component sets when uncovering multiple common components that had been causing damage and pain to consumers for decades, having been “accepted” simply due to their omnipresence, and maintained due to the less known fact that of the tens of millions of devices sold per year, 90% were paid for by insurance companies, and thus already up against a cost ceiling that considered the insurer more than the actual user.
Client:
Truland-McKesson Medical
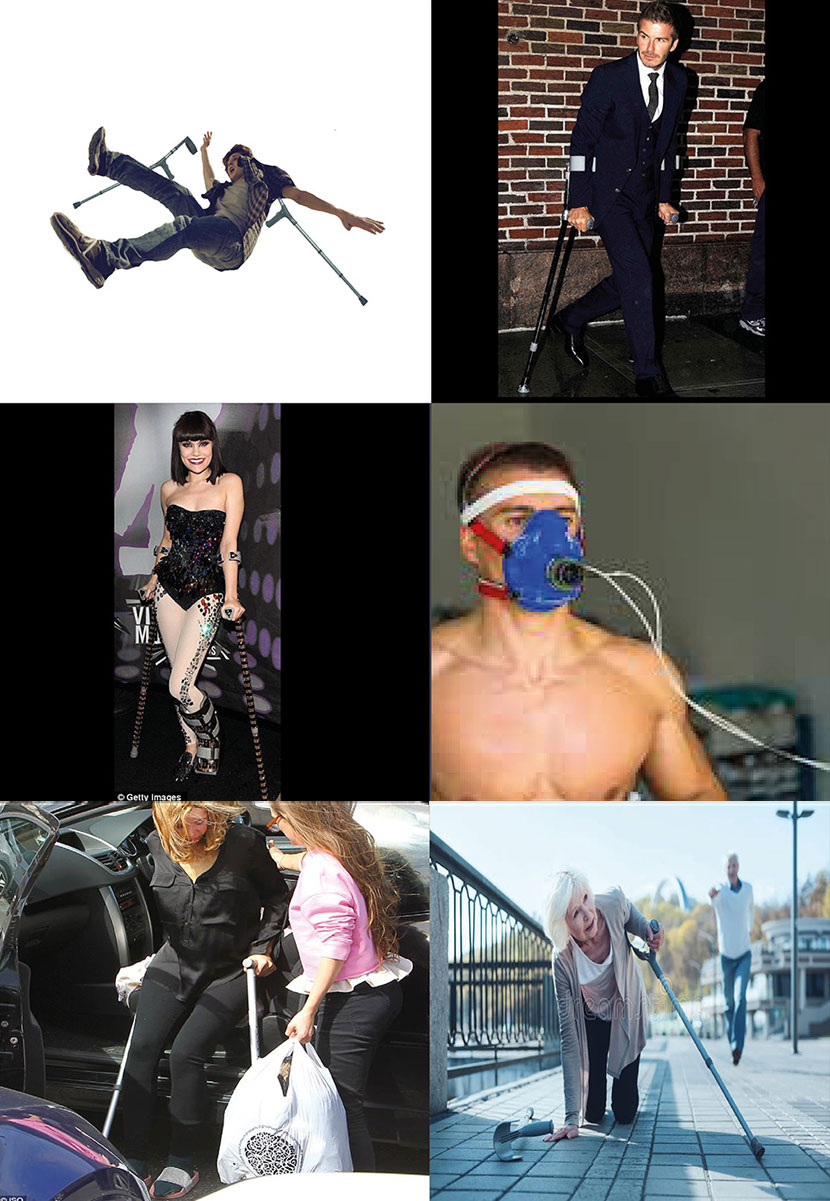
While over 12 million walking aids are sold a year in the U.S., there are over 2 million crutch users in the U.S. alone that suffer from long-term disabilities. However, as these heavy users have to put most of their body weight on these crutches, and due to issues in design with current crutches, most users reported falling at least once a year, with over 10,000 concussions and broken bones attributed to these falls in the U.S. alone.
In addition, as users relied on these crutches for all-day use—from school to black tie events—they complained that crutches in general were not just embarrassing eyesores, but were unnecessarily noisy, attracting attention. Combined with the ever-present anxiety of falling, which also produced a social embarrassment layer in public, many naturally social and attractive crutch users stated they often did not attend key social events simply to avoid this anxiety which reduced their ability to feel comfortable in many settings.
EGG was tasked in creating a medical crutch that did not slip, but after finding several reasons for this core issue, developed a core product for the end-client. With 4 major new component sets that led to 5 other major products, and IP repurposed separately for use in two completely different but significant global consumer markets.*
* See Gripflex case for more information
EGG worked with a handful of lead users, and an extended network of over 500 users for larger data patterning needs. In addition to 1-on-1s, we also used various observational methodologies, including motion mapping, and using in-market equipment ourselves on a daily basis to put ourselves in the shoes of the User.
From the lead Users we discovered that, being lifelong users, every one had experienced a fall with moderate to extreme impact (from broken arms to serious concussions), and an almost fatalistic consensus that these issues simply come with the territory. Several of the lead users’ families had also invested in after-market modification, including using new after-market feet (“ferrules”) that were simply much larger and softer rubber. However, due to the added drag, they reported while the general grip capacity of the ferrules was superior, they actually fell more often than when using standard ferrules due to added drag AND fatigue, adding “its like picking up elephant feet after a few hours every day.” So, we knew this obvious “solution” was not in a direction we’d explore.
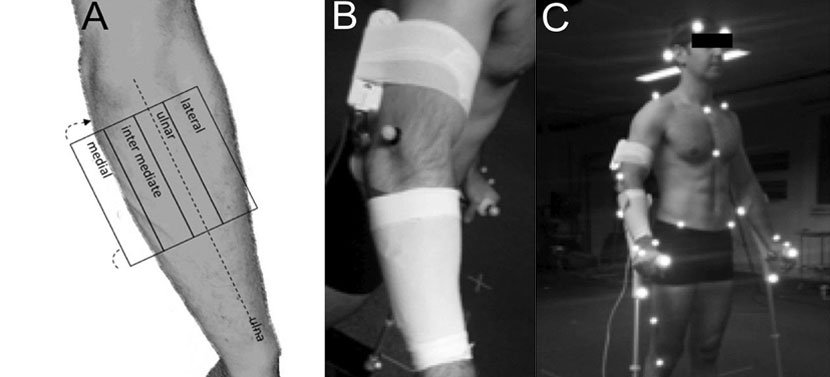
Taking a blank slate approach, we also looked at the positioning of limbs, pressure points, weight and balance considerations of all forms of ambulatory aid devices, and found there was another variable at play no developer or manufacturer had considered.
First, human bodies differ proportionally, and by posture, not just height and baseline weight. Though for the general population, everyone “walks” pretty much the same, with some variation in gait. But for long-term crutch and similar ambulatory aid equipment users, these natural standard deviations from the norm are exacerbated when putting extra weight on handles or offloading it to another body part set. This means one of the main considerations of falling or loss of control is a matter of broad variations in center of weight, and not even limb length, general length, or (in full) a matter of variations in the ground’s surface in re: ferrule slipping. More on this other dimension in a moment. But as many users who complained of falling from using standard lofstrand/medical crutches, also cited repetitive stress injuries, the majority wrist-related, but approximately 20% also in hand/tendon and shoulder/rotator cuff damage.
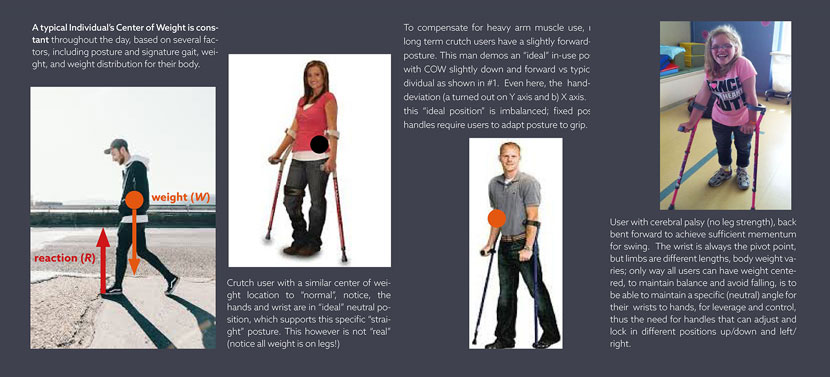
A typical individual’s center of weight is constant throughout the day, based on several factors, including posture and signature gait, weight, and weight distribution for their body.
Crutch user with a similar center of weight location to “normal”, notice, the hands and wrist are in “ideal” neutral position, which supports this specific “straight” posture. This however is not “real” (notice all weight is on legs!)
This “ideal position” is imbalanced; fixed position handles require users to adapt posture to grip. To compensate for heavy arm muscle use, long term crutch users have a slightly forward posture. This man demos an “ideal” in-use posture with COW slightly down and forward vs typical individual as shown in #1. Even here, the hand deviation (a) turned out on Y axis and (b) X axis.
User with cerebral palsy (no leg strength), back bent forward to achieve sufficient momentum for swing. The wrist is always the pivot point, but limbs are different lengths, body weight varies; only way all users can have weight centered, to maintain balance and avoid falling, is to be able to maintain a specific (neutral) angle for their wrists to hands, for leverage and control, thus the need for handles that can adjust and lock in different positions up/down and left/right.
The client’s main objective was “create crutches that won’t slip,” essentially by any means necessary. They also assumed the focus would be on the point of contact with the ground, of the ferrule. This is where we focused most of our time and financial resources for the first 9 months of development. We’d designed and tested prototypes of electro-mechanical feet, ones where separate toes, like a human foot, could adjust to varying terrain to distribute weight more evenly across any variation, but with a base of rubber for general grip. While we had success as far as performance, the client reiterated due to the market (and insurer’s being the primary “customer” as far as price evaluation) total cost could not exceed $150 landed (manufactured). While we’d planned on simplifying some of the core structures, and moving to an aeronautical aluminum (as strong as titanium, but lighter, and same relative cost as standard materials; also in one of our own supply networks, so accessible) and other upstream cost saving measures, the cost-out around the initial hydraulic feet (liquid/mechanical, not electric) we’re still in range considering the other cost savings, but the final (much iterated) working models, consisting of dozens of additional parts pushed the (estimated) manufacturing cost too far out of range.
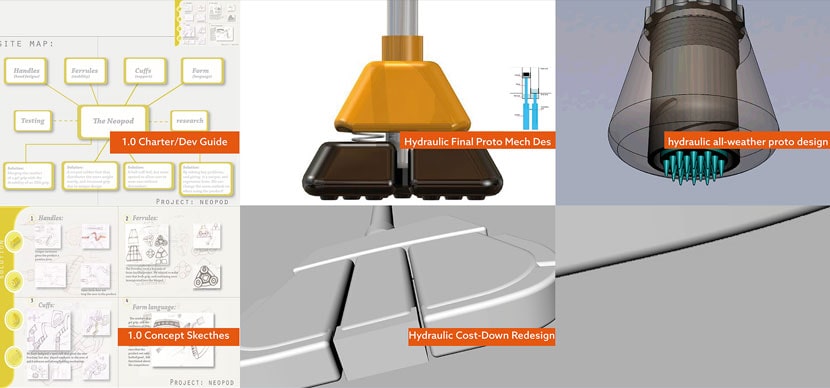
Often when facing a similar challenge, coming up with a literal solution that solved for feasibility and desirability, but financially not viability, we go back to the biological/natural basics to see how nature has solved similar problems.
We’d some experience in repurposing biological structures for heightened performance in consumer-use products, and knew we needed to do some reverse (bio)engineering specifically with the feet of animals in the Squamata Order. The most research available was on the Eublepharis Genus, and several species more commonly known as gecko. They all shared unique characteristics, including specific toe pads that enable them to climb smooth and vertical surfaces, and even cross indoor ceilings with ease.
Gecko species have adhesive toe pads that allow them to adhere to most surfaces without the use of liquids or surface tension. The spatula-shaped setae arranged in lamellae on gecko footpads enable attractive van der Waals’ forces on varied surface materials. We knew part of our focus would be on creating synthetic setae but with mid-range hold, and limited so that our feet could adhere to slippery surfaces, or to smaller pores in absence of gravitational stability, but not to the level we’d have users “stuck to objects”. And this work was very experimental for over 2 months as it had not been done before. The setae on the feet of geckos are also self-cleaning and will usually remove any clogging dirt within a few steps, which was another performance element we needed to incorporate.
Gecko toes can hyperextend in the opposite direction from human fingers and toes. This allows them to overcome the van der Waals force by peeling their toes off surfaces from the tips inward. In essence, by this peeling action, the gecko separates spatula by spatula from the surface, so for each spatula separation, only some overt force (versus momentum) is necessary. This, too, we had to modify, as the specific angle of approach often varied based on a user needing to shift weight or grip position while moving.
But this is also why we used (ultimate 3 for even distribution of weight) “toes” on our feet, to help stabilize while also allowing the pressure from a user’s weight to be distributed more evenly to reduce issues of imbalance from varying centers of weight.
Structure
One of the least discussed but most important structural aspects of gecko’s feet is that they perfectly balance its weight, distributing it evenly across toe-ends which also are the concentrated areas of force against surface.
Real-time, articulated distribution of weight & force.
Minute channels
The toes have separate layered lamellae (like flanges), that provide contrasting grip while also channeling any moisture or oil on a surface in order to maintain contact.
Stability amidst surface material changes, and grip from opposing lamella.
1000 suckers
On an even smaller scale, thousands of setae, essentially microscopic suckers together, allow geckos to stick to, & walk across ceilings but so small, its simple to de-adhere like pulling up the back of an adherent show sole while moving forward.
However, before we even started testing varying structures, we had to supplement a deep materials and materials engineering understanding with a relatively new sub-science: tribology, which adds the dimension of “real time” interaction. The dictionary definition of tribology is: the study of friction, wear, lubrication, and the science of interacting surfaces in relative motion. For us, the primary focus was on determining how to design an elastomer that has adhesive properties (via specific porosity and both unique size and shape of those inherent pores) without having to add, or have users add an after-market adhesive every day, or any day.
We did the observation and testing (yes, recording and documenting frame by frame with Gekkos under glass and clear plastic surfaces) and the chemical and materials experimentation in-house in NYC, designing and printing elastomer prototypes for structural testing. However, given how we were both experimenting and developing with both materials and the fabrication process itself, we used a domestic partner, located in D.C. that was a DOD manufacturing contractor focusing in rubberized tools and objects for the military. Essentially working closely to make and modify “temporary” molds and testing various material formulas. This was a matrices experimental-fabrication process, so without this partner, the 6 months of last mile advanced prototyping (from experience) would have taken a few years had we done so with traditional manufacturing engineering or short-run facilities in our network.

Advanced prototyping component set #1
We’d determined the core design, essentially a 3 toed foot, yet with parts to allow toes to both expand, but then fill smaller crevasses or push against other material facets (such as smaller stones or debris) at a separate angle for complete traction, with smaller cilia on the toes for separate surface grip (smaller pore grip). We also knew we needed a higher durometer than standard natural rubber.
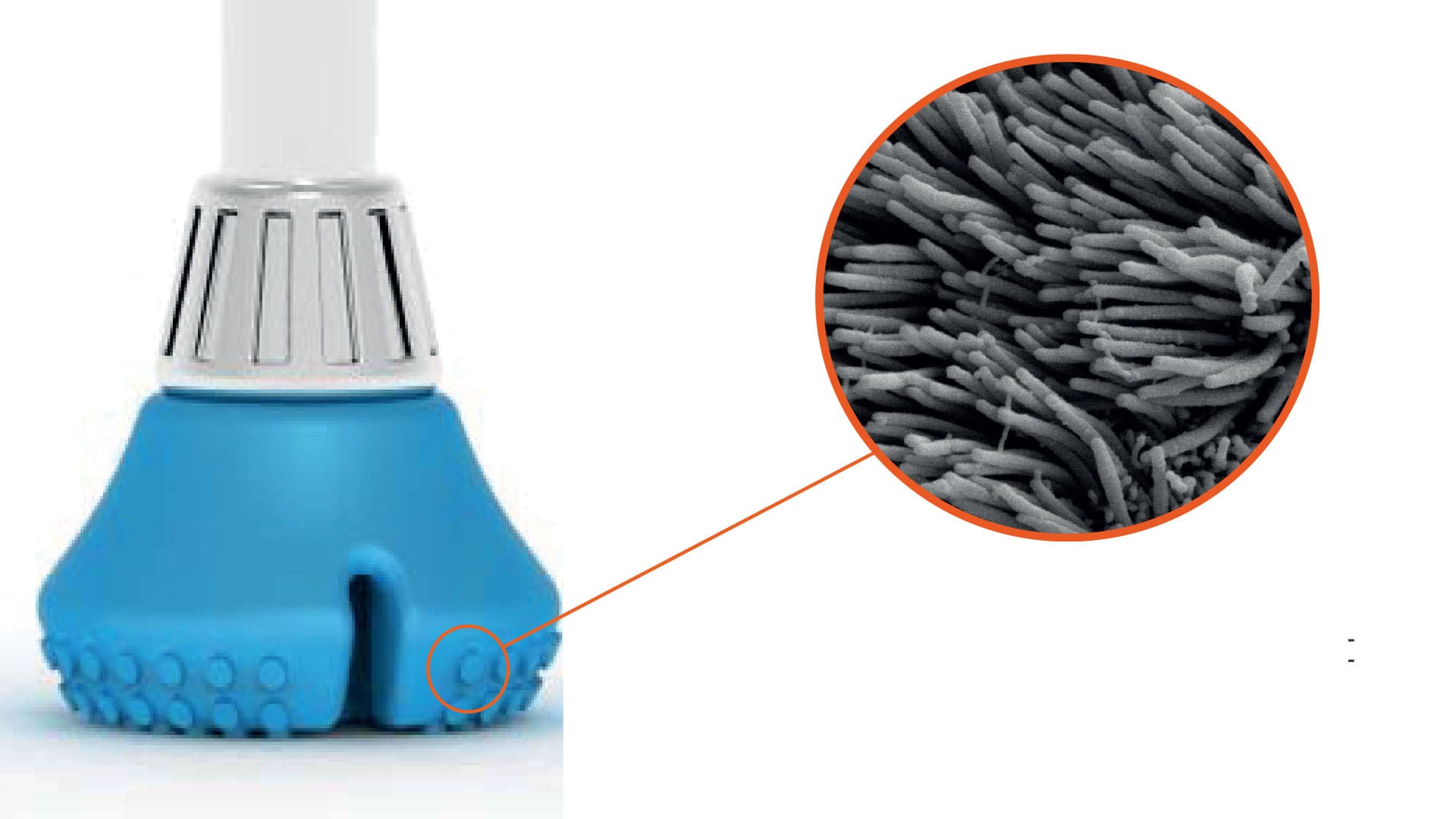
100x
While we could not find an efficient process to co-mold a silica-mimicking layer on top of the Neopod foot itself, we were able to create a consistent microparticle blend to coat the base of the foot. Requiring monthly reapplication for heavy (daily) users.
Handles for pressure grips, pull force control
Introduction of handles (for carrying and control)
The hydria, primarily a pot for fetching water, has two horizontal handles at the sides for lifting, and was introduced 2700 years ago by the Greeks.
Early wheelbarrows involved longer periods of use, but still any stress was on a human back, and still muscles were relaxed, though pulled, and not contracted to put pressure down onto the handles.
It wasn’t until the advent of motorcycles, where aerodynamics of the human body as part of the machine performance was considered, and when humans started distributing significant weight through their wrists for longer periods of time. Even today, only 20,000 annual cases of carpal tunnel damage are reported in the U.S. by motorcyclists, in part due to the assumption of user misuse or personal weakness vs common issue. (“roadrash” in many biker sub-cultures is seen as a mark of warriordom, whereas carpal tunnel damage is deemed something for pocket-protector wearing computer jocks).
Introduction of the reverse pressure grip
Human weight and power applied to machine
At the extreme end, competitive lifting has introduced straps to help stabilize wrists, though even with overhead presses, the external force of pressing comes from the shoulders, and not the wrist.
So, when the first crutches, cycles, motorcycles and power tools were introduced, the mental framework suggested the need to “add a ‘handle’ for control” without considering this was a new type of repetitive grip and activity that required a new type of “handle”.
Punching is the main activity for which the human wrist – as evolved – is meant to support the hand in applying significant force. Many lighter-use plant handed asked likely. As broken a wrist on a lesser scale, this illustration of the one correct hand-wrist position with an 8 ounce mouse shows how “wrong” most handles are for every activity requiring exerting more than a pound of force for more than a few seconds.
Often when facing a similar challenge, coming up with a literal solution that solved for feasibility and desireability, but financially not viability, we go back to the biological/natural basics to see how nature has solved similar problems.
No one ever invented a handle made for the human wrist and hand?
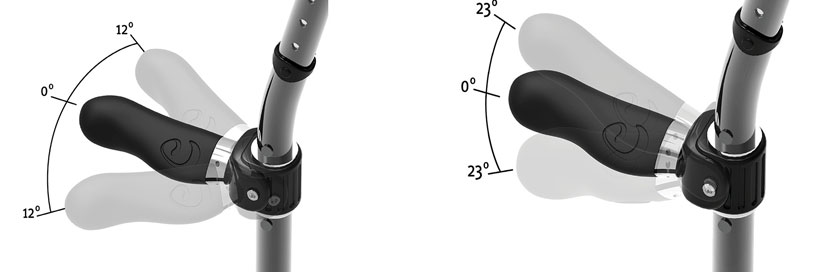
Over half of all mobility device users say they dislike their current products* and we learned that almost every user rebuilt their handles slightly up or down, to the left or right. As up to 50% of their weight is placed on the crutches at all times, their hands and wrists can bear close to 100 lbs with a constant shifting center of weight, it’s a recipe for falling. There were no multi-axial handles for any product, so we designed one to prevent both the common micro-trauma to the hand, wrist, and shoulders and allow the best angle for each individual’s body for maximum control, balance and comfort.
*source: SPA Future Thinking Report 2011
Advanced prototyping
Secondary updates with standard structural elements and advanced assembly for testing use
We took advantage of the opportunity to redesign as many standard components as necessary, given 80% of the materials were duralumin.
One of the main secondary, but still important, concerns with primary users was that crutches were noisy and drew unwanted attention.
The majority of noise was produced by the connecting pins, so we redesigned an integrated pin with self-locking mount which we also produced in the first short run advanced prototyping run.
As all of the related utility patents had already been filed and for accelerated examination, we felt comfortable enough to preview the products to a product-focused audience, and were pleased to receive recognition through Red Dot (International Design Awards), and by IDSA’s IDEA Awards (for best-in-class medical product design).
Thank you!
(As of Q2 2017)
The client decided to run the entire crutch design, minus the multi-axial handle, but expand the use of the Neopod foot across similar use lines and sub-license to industrial vertical partners.

While we’d not planned on reinventing a handle itself in the process, we saw it as a positive spill-over from the work. While we’d assigned the patent to the client as per scope of agreement, and explained the broader applications for their other lines, their legal team asked to maintain the foot patent alone, and so we bought back the IP by returning funds used for that portion of development to be able to use it free and clear for other work, while offering a sub-license for their use.
Also, why we’ve stayed (specifically out) of the consumer medical market with further development of the handle and grip, we have focused on further developing it for use in power-tools and motorcycles, and cycles, the broadest impact/use verticals for this on a consumer basis.

We learned through our user/tester network that users had specific issues with every type of ambulatory aid/device set. So we explored ways to solve these issues in each major type of product through a Neo line.
General crutches, heavy, poor distribution of weight, underarm muscle and tendon damage. Getting onto crutches. One example solution was making “hand steps” as part of the native design, so that a user could use the crutch to get up—particularly useful for older users, but also anyone with severe injury requires bed rest.
10 million cane owners, simply carrying around a cane and transporting it was major issue,. Modern, ultralight pneumatic extending/retracting cane.

*with EGG Lead ID Insu Kim
